شبیه ساز شبکه های کامپیوتری
https://netsimulate.net/simulation-and-analysis-of-computer-networks-in-matlab/
فیلم آموزشی در دست انجام
https://netsimulate.net/learning-simulate-wireless-networks-with-matlab-energy-approach/
مکان یابی اشیای درون ساختمان با WiFi و روش سه گانه در نرم افزار متلب
https://netsimulate.net/location-objects-inside-building-with-wifi-and-triple-method-in-matlab/
 |
 |
 |
 |
 |
 |
همواره مایلم با مشتریان خودم به شکل مستقیم ارتباط برقرار کنم، در همکاری های خودم با سایت ها معمولا این امکان برای من فراهم نمیشد به خاطر همین ترجیح دادم که از ادامه همکاری با سایت های واسط خوداری کنم
برای من گرافیک زیبا، کدنویسی زیبا و ابشن دار(قابلیت تنظیم توسط کاربر) و خلاقیت اهمیت زیادی داره و در هر پروژه و شبیه سازی تمایل دارم که الگوریتمی بکر و نو خلق کنم.
یکی از ویژگیهای اساسی کدنویسی بنده، نمایش کل سناریو شبیهسازی به شکل قدم به قدم و بصری هستش، در روزهای اینده فیلمهای کوتاهی از برخی شبیهسازی اپلود می کنم تا بتونید بیشتر با این رویکرد بنده ارتباط برقرار کنید.
این دستورات خطای زمان اجرا را 100% از بین میبرند اگر این دستورات بالای اسکریپت اصلی حودتون کپی و پیست کنین با هر بار اجرا حافظه و کنسول پاکسازی می شه و تمامی فرمها و کادرها بسته می شند و مسیری که اسریپت اصلی از اونجا اجرا می شه به مراه تمام زیر پوشهها در فهرست مسیرهای شناخته شده متلب اضافه می شه و دیگه نیازی نیست مسیر به شکل دستی اضافه کنین.
ضمنا ای دستورات کاملا استاندارد نوشته شده و هم برای ورژنهای قدیمی و هم ورژن جدید قابل استفاده است.
%% clear commands delete(allchild(0));close all; clear; clc; %% path commands file=matlab.desktop.editor.getActive; try fileDetail=dir(file.Filename); folderName=fileDetail.folder; catch index=strfind( file.Filename,'\'); folderName=file.Filename(1:index(end)-1); end paths=genpath(folderName); addpath(paths); cd(folderName);
توضیحات تفضیلی در این رابطه را در این لینک بخوانید،یادآوری میشم سورس کدها به فروش نمیرسند(چون برای افراد یا سایتهای مختلف نوشته شده.بحث کپی رایت) مگر با تغیرات و اعمال الگوریتم های جدید در انها.
classdef node
properties
x% x position
y % y position
z % z position
energy % primary energy
end
methods
function outObj=node(x,y,z,energy)
outObj.x=x;
outObj. y =y;
outObj. z=z;
outObj.energy =energy;
end
function out=getproperty(obj,in1)
out.x=obj.x;
out. y =obj.y;
out.energy =obj.energy;
end
end
end
در کد بالا یک کلاس با عنوان نود ایجاد شده با ویژگیهای موقعیت و سطح انرژِی، حالا می توان از این کلاس اشیایی ایجاد کرد و در یک یا چند متغیر یا در یک ارایه ذخیره کرد، به شکل زیر :
x=1; y=3.4; z=0; energy=0.5; net.nodes(NInd).nodObj=node(x2,y2,z2,energy);
در ارسال برودکست دو هدف وجود داره از طریق برودکست مقصد را پیدا کنیم، یا هدف ارسال همگانی باشه در شکل زیر مثالی از نوع اول را مشاهده میکنید که عموما در شبکههای بیسیم و خصوصا در الگوریتم مسیریابی AODV کاربرد داره.

اگر سوالی دارید خوشحال میشم کمک کنم.
برچسب( گونه) |
ویژگی 3(زمان گلدهی) |
ویژگی 2(اندازه ساقه) |
ویژگی 1(رنگ گل) |
1 |
1 |
20 |
2 |
2 |
2 |
21 |
1 |
2 |
2 |
24 |
3 |
3 |
3 |
25.3 |
2 |
3 |
3 |
23.3 |
3 |
برای آموزش هر نوع شبکهای که بتواند با تکیه بر ویژگیها یک خروجی به ما بدهد، فقط همین یک جدول را نیاز داریم، به عبارتی برای آموزش هر نوع شبکهای اعم از شبکههای عصبی، درخت تصمیم یا مثلا svm کافی است که یک جدولی مانند جدول بالا را داشته باشیم، سه ستون جدول بالا ویژگیها و یک ستون به عنوان برچسب میباشد. مبنای این آموزش فقط به مشاهده توسط انسان یا نتایج آزمایشها توسط انسان برمیگرده، البته این روش آموزش آموزش با نظارت است، اما نوع خاصی از آموزش را هم داریم که آموزش بدون نظارت است، در این حالت دیگه برچسب مشخص نمیشود و شبکه عصبی با توجه به روبط بین ویژگیها و برخی قوانین معین شده، میتواند ورودی مثل سه ستون اول را دسته بندی کرده و نشان دهد که ویژگیهای موجود در هر سطر مربوط به کدام گروه میباشد.
تو شبیهسازی شبکههای بیسیم ساخت اشیای سه بعدی و توزیع سه بعدی اهمیت زیادی داره، در فضای سه بعدی امکان شبیهسازی عملی و واقعیتر سیگنال و افت مسیر و چند مسیری و. فراهم میشه، در زیر کد ایجاد یک تایر به شکل سه بعدی در متلب آورده شده ، با کپی و پیست این کد در داخل یک اسکریپت متلب میتوانید خروجی زیر را مشادهده کنید.
%% clear commands
function xx
delete(allchild(0));close all;
clear;
clc;
%% path commands
file=matlab.desktop.editor.getActive;
try
fileDetail=dir(file.Filename);
folderName=fileDetail.folder;
catch
index=strfind( file.Filename,'\');
folderName=file.Filename(1:index(end)-1);
end
paths=genpath(folderName);
addpath(paths);
cd(folderName);
side=10;
t=linspace(0,2*pi ,side+1);
t(6)=NaN;
side1=50;
t1=linspace(0, 2*pi ,side1+1);
% ph=0;
% x=r' *cos(t+ph);
% z=(0:side)' * ones(1,side+1);
% y=r' *sin(t+ph) ;
ph=0;
x= cos(t+ph) /5 ;
y= 0*(0:side)';
z= sin(t+ph) /5 ;
% plot3(x,y,z);hold on
% path=(t1+ph).^2;path=path/max(path)
path.x=[0,1,1,1,2,2,2,1,1,0];
path.y=0:length(path.x)-1;
path.x= cos (t1+ph)*5 ;
path.y= sin(t1+ph) *5 ;
[path.x,path.y]=divider(path.x,path.y,2);
[t1,t1]=divider(t1,t1,2);
% plot(path.x ,path.y , 'r');hold on
% xlabel( 'X'); ylabel( 'Y'); zlabel( 'Z')
matrixObj.x= cos(t ) ;
matrixObj.y= 0*(0:side)';
matrixObj.z= sin(t ) ;
for in=1:length(path.x)-1
[ x, y, z]=rotateParameter(matrixObj,[0,0,1],rad2deg(t1(in)));
% path.x= cos (t + ph(in)) ;
% path.y=sin (t+ ph(in) ) ;
%
% plot3(x+path.x(in),y+path.y(in),z,'b-');hold on
surf([x+path.x(in);x+path.x(in+1) ],[y+path.y(in);y+path.y(in+1) ],[z;z],'facecolor','k');hold on; alpha(0.2)
% plot3(x ,y ,z,'b');hold on
axis('equal')
end
end
function [ newx, newy, newz]=rotateParameter(matrixObj,azel,alpha)
u = azel(:)/norm(azel);
alph = alpha*pi/180;
cosa = cos(alph);
sina = sin(alph);
vera = 1 - cosa;
x = u(1);
y = u(2);
z = u(3);
rot = [cosa+x^2*vera x*y*vera-z*sina x*z*vera+y*sina; .
x*y*vera+z*sina cosa+y^2*vera y*z*vera-x*sina; .
x*z*vera-y*sina y*z*vera+x*sina cosa+z^2*vera]';
x = matrixObj.x;
y = matrixObj.y;
z = matrixObj.z;
[m,n] = size(z);
if numel(x) < m*n
[x,y] = meshgrid(x,y);
end
[m,n] = size(x);
newxyz = [x(:) , y(:) , z(:) ];
newxyz = newxyz*rot;
newx = reshape(newxyz(:,1),m,n);
newy = reshape(newxyz(:,2),m,n);
newz = reshape(newxyz(:,3),m,n);
end

یکی از پرکاربردی ترین توابعی که تا حالا توسعه دادم تابع divider هستش، کار این تابع اضافه کردن تعداد معینی نقاط دو بعدی و سه بعدی روی خطوط دو بعدی و سه بعدی هستش، این تابع در دو مد کار می کند، حالت منصفانه که در آن بسته به طول هر خط روی خم، تعداد نقاط را روی آن اضافه میکنه، حالت غیر منصفانه که در آن روی تمام خطوط یک خم بدون توجه به طول آن به یک اندازه نقاط جدید اضافه میکنه
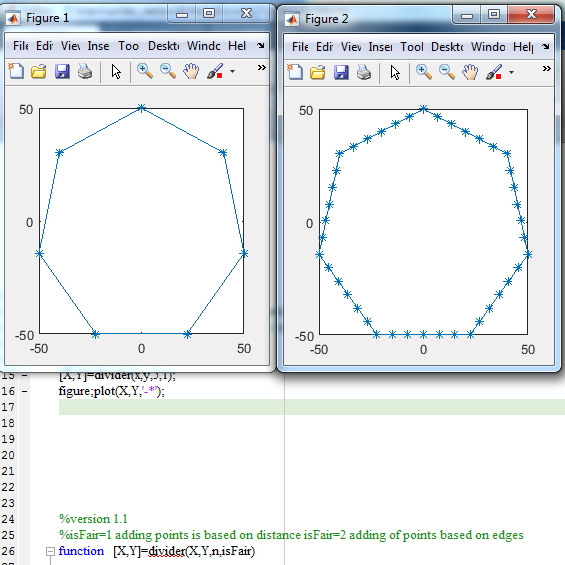
نمونه اجرای زیر حالت غیر منصافنه و منصفانه فراخوانی این تابع را نشان میدهد:

کد این تابع برای حالت دو بعدی
%%%%%%%%%%%%%%%%%%%%%%%%%%-----------software details-----------%%%%%%%%%%%%%%%%%%%%%%
%devloped in Iran(ardebil) %
%Copyright (C) 2017(1396) by moussa hasanzadeh as the head devloper %%
%All rights reserved. %
%programed in mathlab 2016
%gmail:mo30no@gmail.com
%phone 09147082079
%%%%%%%%%%%%%%%%%----------published by http://wcnet.blog.ir/------------%%%%%%%%%%%%%%
%version 1.1
%isFair=1 adding points is based on distance isFair=0 adding of points based on edges
function [X,Y]=divider(X,Y,n,isFair)
try
if isFair==1
else
isFair=0 ;
end
catch
isFair=0;
end
switch isFair
case 0
T1=0;
T2=0;
for i=1:length(X)-1
temp1=0;
temp1=linspace(X(i),X(i+1),n+2) ;
T1=[T1,temp1(1:end-1)];
end
T1=[T1,temp1(end)];
X=T1(2:end);
for i=1:length(Y)-1
temp2=0;
temp2=linspace(Y(i),Y(i+1),n+2) ;
T2=[T2,temp2(1:end-1)];
end
T2=[T2,temp2(end)];
Y=T2(2:end);
case 1
dists= sqrt( (X(2:end)-X(1:end-1)).^2 + (Y(2:end)-Y(1:end-1)).^2) ;
n1=round((dists./min(dists))*n);
T1=0;
T2=0;
for i=1:length(X)-1
temp1=0;
temp1=linspace(X(i),X(i+1),n1(i)+2) ;
T1=[T1,temp1(1:end-1)];
end
T1=[T1,temp1(end)];
X=T1(2:end);
for i=1:length(Y)-1
temp2=0;
temp2=linspace(Y(i),Y(i+1),n1(i)+2) ;
T2=[T2,temp2(1:end-1)];
end
T2=[T2,temp2(end)];
Y=T2(2:end);
end
end
%%%%%%%%%%%%%%%%%%%%%%%%%%-----------software details-----------%%%%%%%%%%%%%%%%%%%%%%
%devloped in Iran(ardebil) %
%Copyright (C) 2017(1396) by moussa hasanzadeh as the head devloper %%
%All rights reserved. %
%programed in mathlab 2016
%gmail:mo30no@gmail.com
%phone 09147082079
% here u can make net objects, setting them and connect them togather, send message and capture them ,. the last version of this library will release at the end of 1397(2018)
% the last version will be a combnation of real and virtual environment for Analysiing of network as a good ,.
%%%%%%%%%%%%%%%%%----------published by http://wcnet.blog.ir/------------%%%%%%%%%%%%%%
اسکریپت فراخوانی این تابع، برای تنظیم مد منصفانه و غیر منصفانه به جای isFair به ترتییب مقدار 1 و 0 قرار دهید. مقدار n هم تعداد را مشخص می کنه
net=[];
net.width=100;
net.length=100;
net.side=7;
net.nodNum=200;
ph=pi/net.side;
t=linspace(0,2,net.side+1);
x=sin(pi*t+ph); x=(((x-min(x))/(max(x)-min(x)))-0.5)* net.length;
y=-cos(pi*t+ph);y=(((y-min(y))/(max(y)-min(y)))-0.5)*net.width;
figure;plot(x,y,'-*');
[X,Y]=divider(x,y,5,1);
figure;plot(X,Y,'-*');
net=[];
net.width=100;
net.length=100;
net.side=7;
net.nodNum=200;
ph=pi/net.side;
t=linspace(0,2,net.side+1);
x=[1,3,1.2,6,4]
y=[4,0,12.2,3,1]
figure;plot(x,y,'-*');
[X,Y]=divider(x,y,5,1);
figure;plot(X,Y,'-*');
axis('equal')
در کد زیر شما با اعمال تنظیمات میتونید تعداد نود(nodNum)، چند ضعلی بودن محیط شبکه (side)، رنگ بندی('r*') ، طول عرض محیط شبکه یا ناحیه شبکه(width و) جهت گیری محیط شبکه(ph) را تغییر دهید، با این وجود اگر net.side را به 3، 5 و. تغییر بدهید، تعدادی از نودها در خارج از شبکه قرار میگیرند، برای حل این مشکل از تابع دیوایدر و یک الگوریتم ابتکاری می تونید استفاده کنید که در پستهای بعدی در مورد ان شرح خواهم داد.
%% clear commands
delete(allchild(0));close all;
clear;
clc;
%% path commands
file=matlab.desktop.editor.getActive;
try
fileDetail=dir(file.Filename);
folderName=fileDetail.folder;
catch
index=strfind( file.Filename,'\');
folderName=file.Filename(1:index(end)-1);
end
paths=genpath(folderName);
addpath(paths);
cd(folderName);
%% net building and initialization
net=[];
net.width=100;
net.length=100;
net.side=4;
net.nodNum=200;
ph=pi/net.side;
t=linspace(0,2,net.side+1);
x=sin(pi*t+ph); x=(((x-min(x))/(max(x)-min(x)))-0.5)* net.length;
y=-cos(pi*t+ph);y=(((y-min(y))/(max(y)-min(y)))-0.5)*net.width;
plot(x,y,'-');hold on;
for NInd=1:net.nodNum
x=(rand-0.5)*net.length;
y=(rand-0.5)*net.width;
energy=0.5;
plot( x,y,'r*');hold on;
end

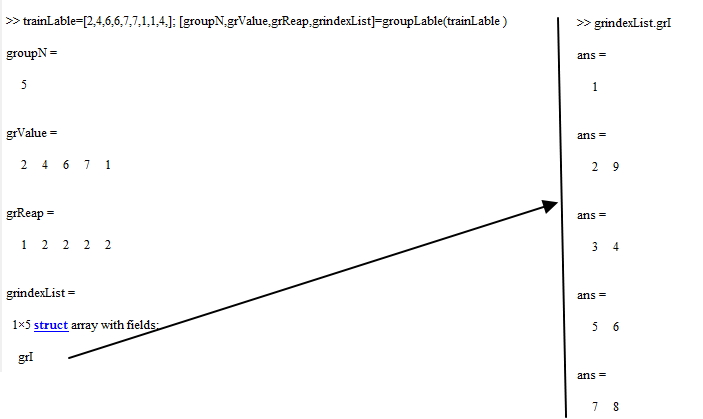
دلیل اصلی نوشتن این تابع، این بود که گاهی وقتها لازم می شد که یک برداری از نظر تعداد تکرار عناصر،طول عناصر بدون تکرار و اندیس(موقعیت) تکرار عناصر مشخص بشه، که در متلب چنین تابعی نبود، اگر هم باشه من اطلاع ندارم، البته توابعی مثل intersect و ismember خروجی مشابهی دارند ولی این توابع موقع مقایسه دو بردار می تونند چنین خروجیهایی را بدهند.
function [groupN,grValue,grReap,grindexList]=groupLable(trainLable )
if size(trainLable,1)>1
trainLable=trainLable';
end
trainLable1=trainLable;
groupN=0;
while(~isempty(trainLable1))
groupN=groupN+1;
gr=(trainLable1==trainLable1(1));
groupCluster(groupN).reap=sum(gr);
groupCluster(groupN).grValue=trainLable1(1);
trainLable1=trainLable1(~gr);
end
grValue=([groupCluster.grValue]);
grReap=([groupCluster.reap]);
grindexList=[];
for grL=grValue
grindexList(end+1).grI= (grL==trainLable).*(1:length(trainLable));
grindexList(end).grI(grindexList(end).grI==0)= [];
end
end
نمونه خروجی و نحوه فراخوانی این تابع در تصویر زیر قابل مشاهده است:
یکی از توابعی که دو سال پیش توسعه دادم، تابع normalVect، این تابع بسیاری کاربردی، یک ماتریس یک بعدی یا یک بردار را دریافت می کنه و مقادیر اون را به شکل پیش فرض بین 0 و 1 مپینگ( توزیع به زبان سادهتر) میکنه و اگر بازه را مشخص کنید بردار یا ماتریس را به همان بازه مپینگ می کنه. سه نمونه از کد فراخوانی تابع را در بالای اون تعبیه کردم ، که می تونید از داخل کنسول متلب یا داخل توابع یا اسکریپت ها او را فراخوانی کنید.
% give a vector or matrix for normalizing between tow number or 0 and 1
% vect=normalVect([1,-2,4,1,11,4,5])
% vect=normalVect([1,-2,4,1,11,4,5],-2,1)
% vect=normalVect([1,-2,4;11,4,5])
function vect=normalVect(varargin)
if nargin==0
msgbox('give a 1 argoment atleast');
vect=[];
elseif ~isnumeric(varargin{1})
msgbox('abnormal argoment');
vect=[];
else
vect=varargin{1};
if nargin==1
vect=(vect-min(vect(:)))./(max(vect(:))-min(vect(:)));
elseif nargin==3 || nargin>3
if varargin{2}~=varargin{3}
vect=(vect-min(vect(:)))./(max(vect(:))-min(vect(:)));
vMin=min([varargin{2},varargin{3}]);
vMax=max([varargin{2},varargin{3}]);
vDif=vMax-vMin;
vect=(vect*vDif)+vMin;
if nargin>3
msgbox('we used 3 argoment only');
end
else
vect=(vect-min(vect(:)))./(max(vect(:))-min(vect(:)));
msgbox('abnormal limits: normaled 0: 1');
end
end
end
end
این تابع کاربرد وسیعی در شبکههای بیسیم دارد، و برای تشخیص وجود نقاط درون یا روی یک چند ضلعی مورد استفاده قرار میگیرد، در زیر یک تکه کد برای آشنایی بیشتر با این تابع به همراه توضیحات خط به خط آورده شده است.
side=18; % side number of polygon L = linspace(0,2.*pi,side+1); %Linearly spaced vector xv = cos(L)'; % x aspect of polygon yv = sin(L)';% y aspect of polygon xq = randn(250,1);%x aspect of point vector yq = randn(250,1);%y aspect of point vector [in,on] = inpolygon(xq,yq,xv,yv); % used for detection of Points located inside or on edge of polygonal region figure plot(xv,yv) % polygon axis equal hold on plot(xq(in),yq(in),'r+') % points inside plot(xq(~in),yq(~in),'bo') % points outside hold off
خروجی اجرای این اسکریپت: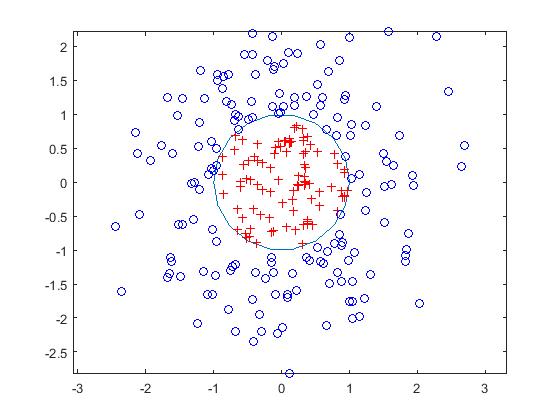
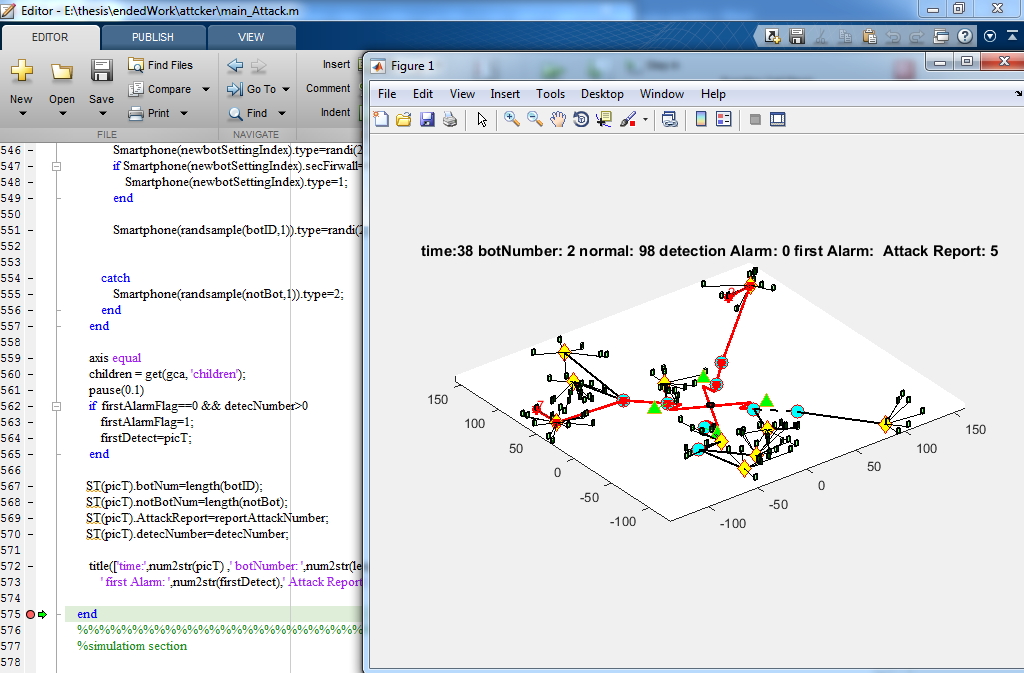
تو این فیلم یک خانه هوشمند شبیهسازی شده که در آن سه نفر در حال رفت و امد در محوطه و داخل خانه هستند، درها از طریق سنسورهای حسگر حضور افراد باز و بسته میشند، هنگام ورود افراد به اتاق سنسورها حضور ان ها را حس کرده و به واحدی مرکزی اطلاع میدند و واحد مرکزی بسته به شرایط دستور روشن کردن چراغ اتاق را صادر میکند، در عین حال به شکل تصادفی از یک تا سه جا نشتی گاز رخ میده یا ممکن اصلا نشتی رخ نده، ولی اگر نشتی داشته باشیم، سنسورهای حسگر آن را به واحد مرکزی گزارش میکنند، واحد مرکزی هم ابتدا گاز و برق را قطع کرده و سپس پنجرهها را روشن میکنند، در این شرایط حتی اگر افراد به داخل اتاق وارد شوند چراغ ها روشن نمی شوند در زیر فیلم کوتاهی از ان شبیهسازی سه بعدی را میتوانید مشاهده کنید.
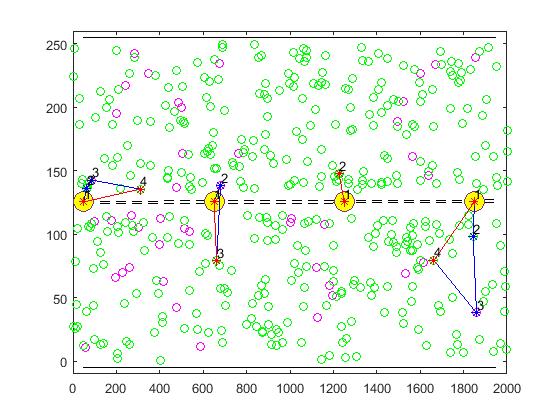
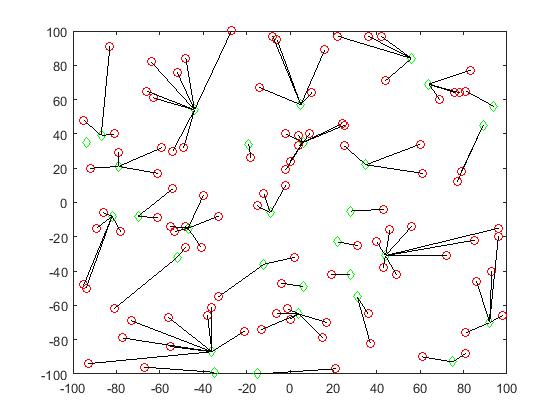
این تابع دارای چهار ورودی و چهار خروجی هست، ورودی اول ایدی نودهای مقصد(مثلا سرخوشه) ورودی دوم ایدی نودهای مبدا(مثلا نودهای عادی که قرار از بین سرخوشه های یکی را انتخاب کنند، ورودی سوم فلق isplot( ایا مسیر بین مبدا و مقصدها رسم شود) ، ورودی چهارمisfigur ( ایا فرم جدیدی باز شود یا نه؟) خروجی اول unDestInd( مجموعه نودهای مقصد منتخب یونیک)، خروجی دوم gridDist( ماتریس فاصله بین نودهای مبدا و مقصد، خروجی سوم selctedDest( بردار ایدی مجموعه نودهای مقصد منتخب غیر یونیک ) خروجی چهارم selctedDict( کمترین فواصل انتخاب شده بین نودهای مبداء و مقصد).
%%caaling script
% find nearst dest point(source vector) from source point
% sourcPos.x=randi([-100,100],1,100);
% sourcPos.y=randi([-100,100],1,100);
%
% destPos.x=randi([-100,100],1,30);
% destPos.y=randi([-100,100],1,30);
% [unDestInd, gridDist,selctedDest,selctedDict]=getNearstDest2D(destPos, sourcPos,1,1);
%%
function [unDestInd, gridDist,selctedDest,selctedDict]=getNearstDest2D(destPos, sourcPos,isplot,isFig)
gridDist=pdist2D(sourcPos,destPos );%distance between all nodes with grid center points
[selctedDict,selctedDest]=min(gridDist,[],2);% here we used an simple algorithm to determine each node in network is belong to which cell in grid network
unDestInd= unique(selctedDest);% if we unique the number of centers that are selected by normal nodes, based on minimum distance, in reality we get the number coverage area
if nargin >=3
if isplot==1
if isFig
figure;
end
plot( sourcPos.x, sourcPos.y,'ro') ;hold on
plot( destPos.x ,destPos.y,'gd') ;hold on
plot([sourcPos.x;destPos.x(selctedDest')] ,[sourcPos.y;destPos.y(selctedDest')],'k-');hold on;
else
end
end
end
% gridDist=pdist2D(sourcPos );%distance between all nodes with destnation nodes
% gridDist=pdist2D(sourcPos,destPos );%distance between all nodes within a vector
function gridDist=pdist2D(s, d )
if nargin==1
xTs=s.x' * ones(1,length(s.x) );
yTs=s.y' * ones(1,length(s.y) );
xTd=ones(1,length(s.x) )' * s.x ;
yTd=ones(1,length(s.y) )' * s.x ;
gridDist=sqrt((xTs - xTd ).^2 +(yTs - yTd ).^2 );
else
xTs=s.x' * ones(1,length(d.x) );
yTs=s.y' * ones(1,length(d.y) );
xTd=ones(1,length(s.x) )' * d.x ;
yTd=ones(1,length(s.y) )' * d.y ;
gridDist=sqrt((xTs - xTd ).^2 +(yTs - yTd ).^2 );
end
end
نمونه خروجی این تابع
یک راز مهمی که انمیشن های امروزی با کیفیت بالایی تولیدو توسعه داده می شوند، استفاده از حسگرهایی هست که حرکات انسان و حیوان حتی اندامکهای چهره و را به کامپیوتر منتقل می کنند.
در این حالت حسگرها به بدن حیوان و انسان نصب می شوند و موقعیت فضایی بخش های مختلف بدن به یک مدل رایانهای منتقل می شوند. و به عبارتی باهم دیگر ست می شوند، حالا با تغییر موقعیت انسان یا حیوان مدل رایانه ای رفتار و حرکات آنها را تقلید میکنه.
این حسگرها می توانند حسگرهای بی سیمی یا سیمی باشند که کمی کند عمل می کنند یا حسگرهایی باشند که با استفاده از دوربین های مادونقرمز عمل می کنند و
نمونه ابتدائی ورود اطلاعات حرکات بدن در فیلم زیر را مشاهده کنید، همچنین کد متلب به همراه دیتاست پیاده روی و دویدن انسان میتوانید دانلود کنید.
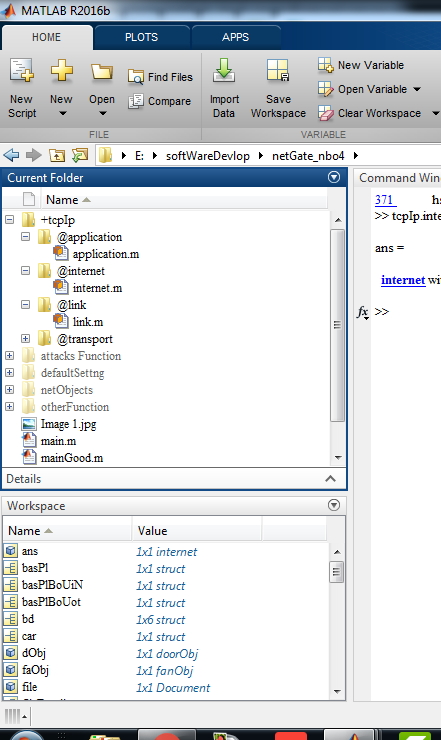
نوشتن پشته پروتکلی، قانون خاصی داره، دانستن این قانون ساده، خودش نصف مسیر!
برای این کار، باید ابتدا یک سرایند ایجاد کنید، سرایند در متلب اسم یک پوشه است که با علامت + شروع میشه، بعد در داخل این سرایند باید یک پوشه همتام کلاس ایجاد کنید، سپس چند اسکریپت باز کرده و کد کلاس مربوط به هر لایه را در داخل اون میارید.
در پشته پروتکلی که خودم نوشتم،حدود 20 پروتکل اصلی اینترنت را در خودش داره، که از جمله میتوان به پروتکل http, ip, icmp, tcp, udp ,. اشاره کرد، از یک سرایند تحت عنوان tcpIp استفاده کردم و چهار لایه کاربردی ، اینترنت، انتقال و لینک را در داخل اون پیادهسازی کردم.
شمای کله این پشته پروتکلی به شکل زیر:
حالا در داخل هر یک از کلاسها پروتکلهای هر لایه در قالب توابع نوشته میشوند که برای نمونه می توان پروتکل dhcp را در دخل کلاس application به شکل زیر مشاهده کرد:
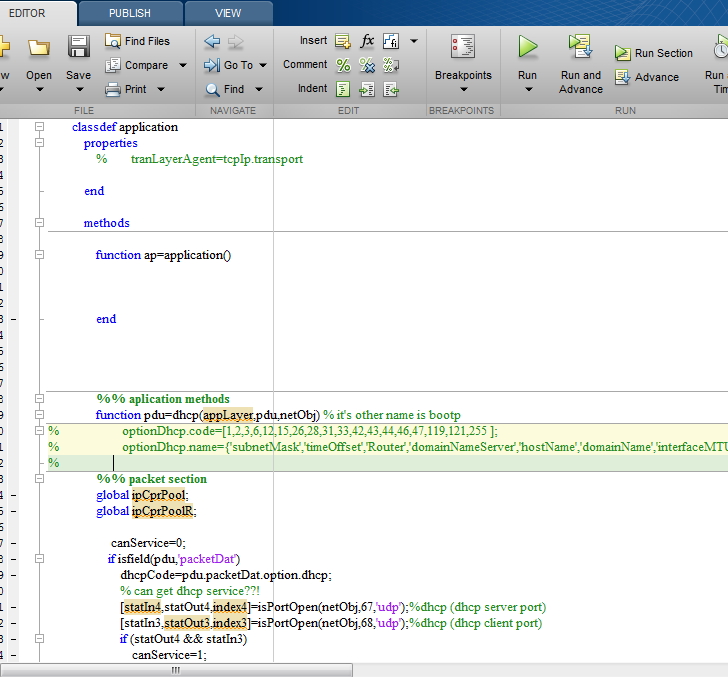
اما هر لایه یک تابع ورودی داره که معمولا به نام اون لایه inport اضافه میشه ، وظیفه این تابع بررسی اولیه پکت دریافتی از لحاظ نوع، محتوا و. هستش، سپس بر مبنای نتیجه حاصله، این تابع ، پکت ره به پروتکلهای همان لایه یا به لایه بالاتر ارسال میکنه، زمانی که به لایه هدف رسید، که می تونه لایه لینک، اینترنت، انتقال یا هر لایه دیگه ای باشه، اون لایه بعد از ایجاد پاسخ اون را از همان مسیر به پایین ترین لایه ارسال می کنه تا در نهایت در اینترنت رها بشه و
ولی وقتی قرار یک کامپیوتر یا گوشی پکتی را ارسال کنه هر لایه از طریق تابعی هم نام لایه + outport استفاده میکنه تا در نهایت به پایین ترین لایه برسه در این حین از طریق لایه لینک در اینترت رها می شه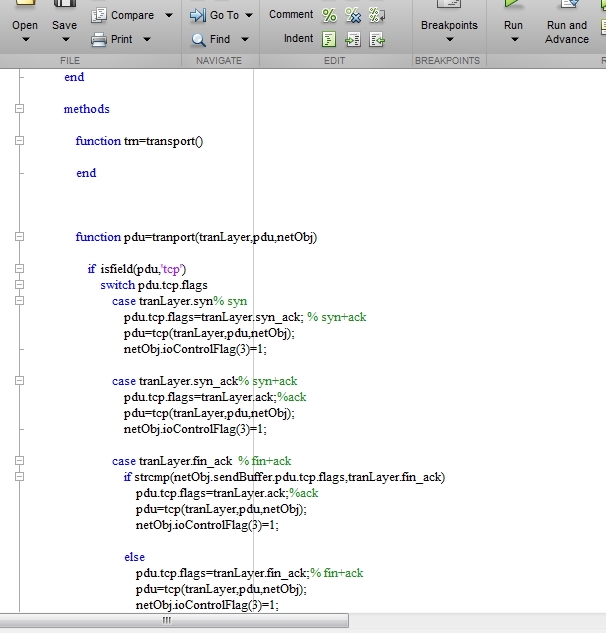
در ادامه اجرای پروتکل tcp, http , icmp, arp را با استفاده از شبیهسازه netGate_nbo تحت این پشته پروتکل، در فیلم کوتاه زیر مشاهده کنین، حجم این فیلم 9 مگابایت
یادآوری میشه که تمام شبیهسازیهای مرتبط با شبکه کامپیوتر و امنیت در محیط این شبیه ساز که باز زبان متلب آن را توسعه دادم انجام می گیره.
برای سفارش پروژه های امنیت در شبکههای کامپیوتری می تونید با این شماره تماس بگیرید یا در واتس اپ و تلگرام پیام بدید 09147082079
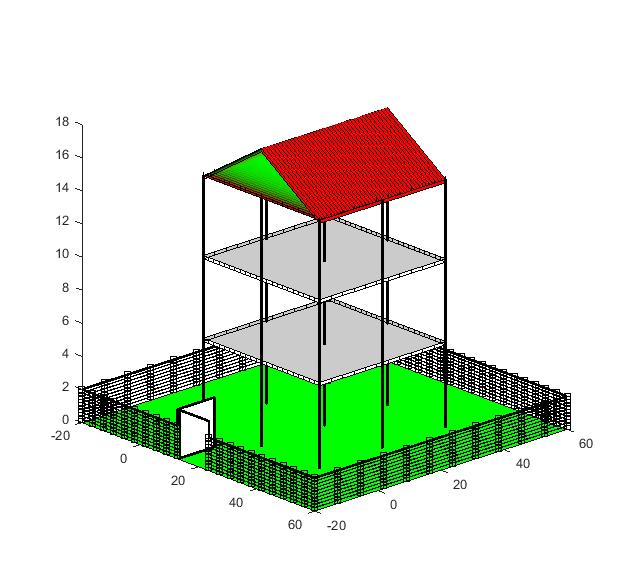
این درخت سه بعدی برای پروژه معماری یک دانشجوی ایرانی مقیم خارج برای یک سیستم ابرسانی پیاده سازی شده.
پیادهسازی با استفاده از یک تابع بازگشتی و توابع سینوس و کسینوس انجام گرفته
برای اعمال بعد سوم از روش رشد مقطع استفاده شده، یعنی بعد از ایجا مسیر و مقطع به عنوان مثال دایره، مربع و مثلث، این مقاطع در مسیر تعریف شده حرکت کرده و در نقاط دو بعدی یا سه بعدی کپی میشود.
با این وجود به خاطر بحث کپی رایت از انتشار کد در حال حاضر معذوریم.
دو عدد اول از شما درخواست می کنه، بعد از آماده سازی کلید های خصوصی و عمومی یک متن را از شما خواهد خواست یا اینکه شما می تونید با یک سری تغییراتی یک بردار عددی را مستقیما به الگوریتم تحویل بدید، چون متن در نهایت به کد اسکی اون تبدیل می شه، بعد الگوریتم، متن رمزگذاری شده و متن رمزگشایی شده را به همراه کد اسکی متن رمزگذاری شده و رمزگشایی شده به شما برمی گردونه.
clc;% clear theconsol
clear;%clear the memory and variables
delete(allchild(0)); %close all open diologs
file=matlab.desktop.editor.getActive;
try
fileDetail=dir(file.Filename);
folderName=fileDetail.folder;
catch
index=strfind( file.Filename,'\');
folderName=file.Filename(1:index(end)-1);
end
paths=genpath(folderName);
addpath(paths);
cd(folderName);
disp('RSA algorithm');
p=input('Enter the prime no. for p: ');
q=input('Enter the prime no. for q: ');
n=p*q;
fprintf('\nn=%d',n);
phi=(p-1)*(q-1);
fprintf('\nphi(%d) is %d',n,phi);
e=randsample( primes(n-1),1);
val1=0;
d=0;
while(val1~=1)
d=d+1;
val1=mod(d*e,phi);
end
fprintf('\nd=%d',d);
fprintf('\nPublic key is (%d,%d)',e,n);
fprintf('\nPrivate key is (%d,%d)',d,n);
m=input('\nEnter the message: ','s');
m1=m-0;
disp('ASCII equivalent of message ');
disp(m1);
over=length(m1);
o=1;
while(o<=over)
m=m1(o);
diff=0;
if(m>n)
diff=m-n+1;
end
m=m-diff;
% beacause matlab dont support larg number modulus operation then
% encription and deription is done in bit level
qm=dec2bin(e);
len=length(qm);
c=1;
xz=1;
while(xz<=len)
if(qm(xz)=='1')
c=mod(mod((c^2),n)*m,n);
elseif(qm(xz)=='0')
c=(mod(c^2,n));
end
xz=xz+1;
end
c1(o)=c;
c1(o)=mod(m^e ,n);
% nm2(o)=mod(c1(o)^d ,n)+diff;
% Public key is (e,n) => (7,33)
% Private key is (d,n) => (3,33)
% The encryption of m = 2 is c = 27 % 33 = 29
% The decryption of c = 29 id m =293 % 33 = 2
qm1=dec2bin(d);
len1=length(qm1);
nm=1;
xy=1;
while(xy<=len1)
if(qm1(xy)=='1')
nm=mod(mod((nm^2),n)*c,n);
elseif(qm1(xy)=='0')
nm=(mod(nm^2,n));
end
xy=xy+1;
end
nm=nm+diff;
nm1(o)=char(nm);
o=o+1;
end
o=1;
fprintf('\nThe encrypted message in ASCII is \n');
while(o<=over)
fprintf('\t%d',c1(o));
o=o+1;
end
o=1;
fprintf('\nThe encrypted message is \n');
disp(char(c1))
fprintf('\nThe decrypted message in ASCII is \n');
while(o<=over)
fprintf('\t%d',nm1(o));
o=o+1;
end
fprintf('\nThe decrypted message is: ');
disp(nm1);
fprintf('\n');
همانطور که می دونید متلب زوایه 360 درجه را به شکل دو بخش منفی و مثبت 180 درجه ای نشون می ده، این مسئله باعث بروز مشکل در پیاده سازی برخی الگوریتمهایی می شه که با زوایه کار می کنند، به عنوان مثال زمانی که شما تعدادی نقاط پخش شده در فضا دارید و بخواهید که کوتاهترین مسیر بین آنها را پیدا کنید، یک روش ساده مرتب سازی این نودها بر مبنای مختصات قطبی و خصوصا زوایه هستش، در چنین مواقعی نقاط قطبی دو بخشی پاسخگو نیست بر همین اساس من یک تابع ساده را برای حل این شکل نوشتم، که ورودی اون زوایه دو بخشی(0تا 180 و 0تا -180) و خروجی اون زوایه یک بخشی 0تا 360 درجه هستش.
کد متلب این تابع:
%convert 2 pole angle to 1 pole degree or radian %angl=Angle2pol_To_1pol([5,95,-95,0],2) %angl=Angle2pol_To_1pol( -95,2) function angl=Angle2pol_To_1pol(angl,type) if nargin==1 type=1; end switch type case 1% radian type angl=mod(angl,2*pi); miInd=angl<0; angl(miInd)=(2*pi)+angl(miInd); case 2 angl=mod(angl,360); miInd=angl<0; angl(miInd)=(360)+angl(miInd); end end
نمونه استفاده از این تابع و خروجی حاصل در تصویر زیر ابتدا مختصات دکارتی نکات درهم و برم به مختصات قطبی ان تبدیل شده و سپس با تبدیل زوایه دو بخشی به زاوایه یک بخشی 360 درجه و مرتب سازی آن بر اساس زاویه، شکل سمت چپ به شکل سمت راست تغییر پیدا کرده، این روش بسیار ساده می تونه برای پیدا کردن کوتاهترین مسیر هم مورد استفاده قرار بگیره.
%%%%%%%%%%%%%%%%%%%%%%%%%%-----------simulation area-----------%%%%%%%%%%%%%%%%%%%%%%
% devloped in Iran(ardebil) %
% Copyright (C) 2017(1396) by moussa hasanzadeh. %
%All rights reserved. %
%programed in mathlab 2016 %
%gmail:mo30no@gmail.com
%phone: 09147082079
function vlia1
clc
clear;
delete(allchild(0));
sideN=4;
t1=linspace(0,1,sideN+1);%vector between 0 and 1
X=-sin(2*pi*t1+(pi/sideN));%node X coordinates with phaze shift
Y=-cos(2*pi*t1+(pi/sideN));%node Y coordinates with phaze shift
X=((((X-min(X))/(max(X)- min(X)))*2)-1)./5;%normalize and schale X
Y=((((Y-min(Y))/(max(Y)- min(Y)))*2)-1)./5;%normalize and schale Y
Z= (1:length(Y))*0 ;
for x=0:20:40
for y=0:20:40
for z=1:15
plot3(X+x,Y+y,Z+z,'k');hold on
plot3([X+x;X+x],[Y+y;Y+y],[Z+z*0;Z+z],'k');hold on
end
end
end
xVec=[0,20,40,40,20,0,0];
yVec=[0,0,0,40,40,40,0];
zVec1=yVec*0;
zVec1([2,5])=zVec1([2,5])+3;
[xVec,yVec]=dividerE(xVec,yVec,10);
zVec=yVec*0;
[~,zVec1]=dividerE(xVec,zVec1,10);
hj1=fill3([xVec],[yVec],[zVec+5],'w');alpha(hj1 ,1)
hj1=fill3([xVec],[yVec],[zVec+5+0.2],'k');alpha(hj1 ,0.2)
hj3=fill3([xVec;xVec],[yVec;yVec],[zVec+5;zVec+5+0.2],'k');alpha(hj3 ,0.7)
hj2=fill3([xVec],[yVec],[zVec+10],'w');alpha(hj2 ,1)
hj2=fill3([xVec],[yVec],[zVec+10+0.2],'k');alpha(hj2 ,0.2)
hj3=fill3([xVec;xVec],[yVec;yVec],[zVec+10;zVec+10+0.2],'k');alpha(hj3 ,0.7)
hj3=fill3([xVec],[yVec],[zVec+15],'k');alpha(hj3 ,0.2)
hj3=fill3([xVec;xVec],[yVec;yVec],[zVec+15;zVec+15+0.2],'k');alpha(hj3 ,0.7)
xVecPentHous=[0,20,40,20,0];
yVecPentHous=[0,0,0,0,0] ;
zVecPentHous=[15,15,15,18,15];
for mm=1:39
% fill3(xVecPentHous,yVecPentHous+mm,zVecPentHous,'k--')
km=fill3(xVecPentHous,yVecPentHous+mm,zVecPentHous,'g-');hold on
alpha(km,0.2)
end
fill3([xVec],[yVec],[zVec+15],'r')
zVec1=zVec1+15;
fill3([xVec],[yVec],[zVec1],'r-','edgecolor','k')
fill3([xVec],[yVec],[zVec1-0.2],'r-','edgecolor','k')
hj1=fill3([xVec*2]-20,[yVec*2]-20,[zVec],'g');alpha(hj1 ,1)
yardVect=[13:length(xVec),1:10]
hj1=fill3([[xVec(yardVect)*2]-20;[xVec(yardVect)*2]-20],[[yVec(yardVect)*2]-20;[yVec(yardVect)*2]-20],[zVec(yardVect);zVec(yardVect)+2],'r');
for difIndex=1:10
zVec=zVec+0.2;
hj1=plot3([xVec(yardVect)*2]-20,[yVec(yardVect)*2]-20,[zVec(yardVect)],'ks-','lineWidth',1);alpha(hj1 ,1);hold on
end
zVec(11:12)=zVec(11:12)+1;
xVec(11)= xVec(10);
xVec(12)= xVec(13);
hj1=plot3([xVec*2]-20,[yVec*2]-20,[zVec],'k-','lineWidth',2);alpha(hj1 ,1);hold on
zVec([10,13])=0;
door=[10,11,12,13,10]
matrixObj.x=[xVec(door)*2]-20;
matrixObj.y=[yVec(door)*2]-20;
matrixObj.z=[zVec(door)];
[ newx, newy, newz]=rotateParameter(matrixObj,[0,0,1],90);
hj1=fill3(newx-sqrt((xVec(10)-xVec(13)).^2)*1.3, newy-32, newz ,'w','lineWidth',2);alpha(hj1 ,1);hold on
end
function [X,Y]=dividerE(X,Y,n)
T1=0;
T2=0;
for i=1:length(X)-1
temp1=0;
temp1=linspace(X(i),X(i+1),n+2) ;
T1=[T1,temp1(1:end-1)];
end
T1=[T1,temp1(end)];
X=T1(2:end);
for i=1:length(Y)-1
temp2=0;
temp2=linspace(Y(i),Y(i+1),n+2) ;
T2=[T2,temp2(1:end-1)];
end
T2=[T2,temp2(end)];
Y=T2(2:end);
end
function [ newx, newy, newz]=rotateParameter(matrixObj,azel,alpha)
u = azel(:)/norm(azel);
alph = alpha*pi/180;
cosa = cos(alph);
sina = sin(alph);
vera = 1 - cosa;
x = u(1);
y = u(2);
z = u(3);
rot = [cosa+x^2*vera x*y*vera-z*sina x*z*vera+y*sina; .
x*y*vera+z*sina cosa+y^2*vera y*z*vera-x*sina; .
x*z*vera-y*sina y*z*vera+x*sina cosa+z^2*vera]';
x = matrixObj.x;
y = matrixObj.y;
z = matrixObj.z;
[m,n] = size(z);
if numel(x) < m*n
[x,y] = meshgrid(x,y);
end
[m,n] = size(x);
newxyz = [x(:) , y(:) , z(:) ];
newxyz = newxyz*rot;
newx = reshape(newxyz(:,1),m,n);
newy = reshape(newxyz(:,2),m,n);
newz = reshape(newxyz(:,3),m,n);
end
این هم یک تصویر از نتیجه کار:
شما می دونید که معادله یک خط در فضا به شکل y=ax+b هستش و نمایش دیگر و کاربردی اون هم به شکل (y-y1=m(x-x1 هستش، حالا در اینجا ما فقط یک خط در دو بعد داریم، با این حساب ب داشتن شیب یا همان m و یک نقطه (x1,y1) ما قادر خواهیم بود که با گرفتن مقدار مختصه x مقدار تابع را به ازای آن مختصه بدست بیاوریم. یا برعکس با داشتن مقدار y شما میتوانید مقدار x نقطه را به ازای آن بدست بیاوید . در زیز کد متلب این عمل را می آوریم.
%% clear commands
delete(allchild(0));% delete all figures and graphical objects
clear;% Remove items from workspace, freeing up system memory
clc;% clear the Console
m=5;
x1=5, y1=10;
syms x;
y=m*(x-x1)+y1;
x2=input('give a x coordinate:\n ');
x=x2;
y2=eval(y);
plot([x1,x2],[y1,y2],'o--g');hold on;
x3=input('give another one x coordinate:\n ');
x=x3;
y3=eval(y);
plot([x2,x3],[y2,y3],'o--m');
نمونه خروجی این کد:

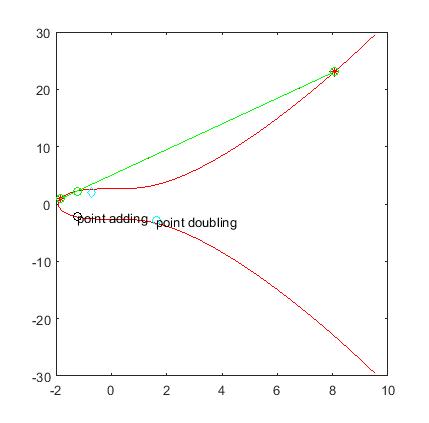
همانطور که میدونید معادله عمومی منحنی بیضوی به شکل y2 = x3 + ax + b میباشد که در ورژن بیت کوین مقدار ضریب a برابر صفر و مقدار ثابت b برابر 7 میباشد. نمای کلی منحنی بیضوی بیت کوین به شکل زیر میباشد:

از ویژگیهای جالب این منحنی عبارتند از:
1- اگر دو نقطه را در روی منحنی انتخاب کنید که خط واصل آنها عمودی نباشد، خط واصل این دو نقطه، نقطه سومی را روی منحنی قطع خواهد کرد، که اگر این نقطه را نسبت به محور xها متقارن کنیم، حاصل آن برابر با حاصل جمع دو نقطه اولیه خواهد بود.(point adding)
برای اضافه کردن دو نقطه به هم از روابط زیر استفاده میشود، که rx و ry حاصل اضافه کردن این دو نقطه میباشد.
c = (qy – py) / (qx – px) rx = c2 – px – qx ry = c (px – rx) – py
2- اگر یک نقطه ای را در روی این نمودار انتخاب کنیم، و چند بار ان نقطه را با خودش جمع کنیم، دوباره نقطه جدید روی این منحنی خواهد افتاد.(point doubling)
برای اضافه کردن یک نقطه به خودش از روابط زیر استفاده میشود، که rx و ry حاصل اضافه کردن این نقطه به خودش میباشد.
c = (3px2 + a) / 2py rx = c2 – 2px ry = c (px – rx) – py
در ادامه کد متلب پیادهسازی این عملیات را میتوانید به شکل زیر مشاهده کنید:
clc; clear; close all; % An elliptic curve is represented algebraically as an equation of the form % y2 = x^3 + ax + b ,For a = 0 and b = 7 (the version used by bitcoin), it looks like this y2 = x^3 + 7 x=- nthroot(7,3):0.02: nthroot(7,3)*5; y = sqrt(((x.^3) +7)); plot(x, real(y),'r- ', 'lineWidth',1);hold on; plot(x,-real(y),'r- ', 'lineWidth',1);hold on; %% point adding px=x(5) ;py=real(y(5)) ;qx=x(500) ; qy=real(y(500)) ; c = (qy - py) / (qx - px) ; rx = (c^2) - px - qx; ry = c* (px-rx) -py; [X,Y]=polyxpoly( [px,qx],[py,qy],x,real(y)); plot([px,qx],[py,qy],'r*-') plot( X,Y,'go-');hold on; plot( rx,ry,'ko-');hold on; text( rx,ry,'point adding'); %% point doubling px=x(60) ;py=real(y(25)) ; c = (3*(px^2) + 0) / (2*py); rx = (c^2) - (2*px); ry = c*(px - rx) - py; plot( px,py ,'cd-') plot( rx,ry,'co-'); text( rx,ry,'point doubling');
نمونه خروجی:
این پست با پیادهسازی کامل بروزرسانی خواهد شد.
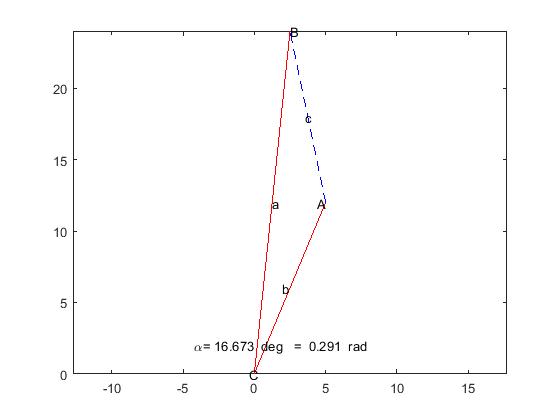
طبق مثالی که اوردم ، سه نقطه به عنوان ورودی در نظر گرفته شده، که نقطه اول C به عنوان مبداء و نقطه اتصال خط a و خط b ، نقطه B ( انتهای خط a) نقطه A، انتهای خط b. دقت کنین که زاویهها با حروف بزرگ و خطوط روبروی هر زاوایه حرف کوچک آن زوایه میباشد.
شما با تغییر مقادیر نقاط میتوانید زاویههای مرتبط با آنها را مشاهده کنید
کد متلب این مثال:
%% clear commands
delete(allchild(0));% delete all figures and graphical objects
clear;% Remove items from workspace, freeing up system memory
clc;% clear the Console
%% path commands
file=matlab.desktop.editor.getActive;% get current script address
try % if dont occur any error this block will run
fileDetail=dir(file.Filename);% get current script details
folderName=fileDetail.folder;% get current script folder name
catch% else if an error occurs then
index=strfind( file.Filename,'\');% find index of back space(\) in path text
folderName=file.Filename(1:index(end)-1);% select all path text from 1 to last Occurrence of \ as script folder name
end
paths=genpath(folderName);% make current path and all sub paths
addpath(paths);% add all paths in known paths of matlab
cd(folderName);% go to path that current script runned from that
A_x=5;
A_y=12;
B_x=A_x/2;
B_y=A_y*2;
C_x=0/3;
C_y=0;
c=sqrt( ((B_x-A_x)^2) +( (B_y-A_y)^2));
b=sqrt( ((A_x-C_x)^2) +( (A_y-C_y)^2));
a=sqrt( ((B_x-C_x)^2) +( (B_y-C_y)^2));
tSlop=(a^2 +b^2 -c^2)/(2*a*b);
alpha_rad= (acos(tSlop));
alpha_deg=rad2deg(acos(tSlop));
figure;
plot([ C_x,A_x],[C_y,A_y],'r-');hold on
plot([ C_x,B_x],[C_y,B_y],'r-');hold on
plot([ A_x,B_x],[A_y,B_y],'b--');hold on
text(A_x,A_y,'A','Horizontalalignment', 'right');
text(B_x,B_y,'B','Horizontalalignment', 'left');
text(C_x,C_y,'C','Horizontalalignment', 'center');
text((A_x+C_x)/2 ,(A_y+C_y)/2,'b','Horizontalalignment', 'right');
text((B_x+C_x)/2 ,(B_y+C_y)/2,'a','Horizontalalignment', 'left');
text((A_x+B_x)/2 ,(A_y+B_y)/2,'c','Horizontalalignment', 'center');
text(C_x+2 ,C_y+2,[ '\alpha= ' num2str(alpha_deg) ' deg ' ' = ' num2str(alpha_rad) ' rad '],'Horizontalalignment', 'center');
axis('equal')
خروجی نمونه(example output)
در صورت انتخاب موضوع و تایید استاد راهنما ، فورا به ما اطلاع بدین تا وضعیت آنهارا بروزرسانی کنیم.
1 مسیریابی در شبکه های ادهاک با استفاده از الگوریتم ،DSR+دایسترا
2- مسیریابی در شبکه های ادهاک با استفاده از الگوریتم AODV+دایسترا
3- مسیریابی در شبکه های ادهاک با استفاده از الگوریتم ،HSR+دایسترا
4- مسیریابی در شبکه های ادهاک با استفاده از الگوریتم ABR+دایسترا
5- مسیریابی در شبکه های ادهاک با استفاده از الگوریتم FSR+دایسترا
6- مسیریابی در شبکه های ادهاک با استفاده از الگوریتم WRP+دایسترا
7- مسیریابی در شبکه های ادهاک با استفاده از الگوریتم CGSR +دایسترا
8- مسیریابی در شبکه های ادهاک با استفاده از الگوریتم DSDV +دایسترا
9- مسیریابی در شبکه های ادهاک با استفاده از الگوریتم GSR +دایسترا
10- مسیریابی در شبکه های ادهاک با استفاده از الگوریتم TORA +دایسترا
11- مسیریابی در شبکه های ادهاک با استفاده از الگوریتم LMR +دایسترا
12- مسیریابی در شبکه های حسگر بی سیم با استفاده از الگوریتم BEE (Balanced Energy-Efficient Clustering)
13- مسیریابی در شبکه های حسگر بی سیم با استفاده از الگوریتم BEEM (multi hop BEE)
14- مسیریابی در شبکه های حسگر بی سیم با استفاده از الگوریتم S-WEB (multi hop BEE)
15- مسیریابی در شبکه های بی سیم با استفاده از الگوریتم گرگ خاکستری
16- مسیریابی در شبکه های بی سیم با استفاده از الگوریتم CCS
17- مسیریابی در شبکه های بی سیم با استفاده از الگوریتم EAR
18- مسیریابی در شبکه های بی سیم با استفاده از الگوریتم PGR
19- مسیریابی در شبکه های بی سیم با استفاده از الگوریتمPGR_EP(ترکیب دو الگوریتم بالا)
1- تشخیص نفوذ در شبکه های کامپیوتری با استفاده از داده پردازی واکنشی
2- استخراج دانش از متن های رمز شده با استفاده از واقعیت کاوی داده
3- کشف آلودگی شبکه های کامپیوتری براساس نظریه بازی ها
4- سیستم تشخیص نفوذ (IDS) چندگانه در شبکه های حسگر بی سیم بر اساس داده کاوی تکاملی
1- بازسازی جملات یک متن در هم و برم با تکنیک داده پردازی
2- تشخیص اعتماد به نفس از روی چهره
3- تخمین ضریب هوشی افراد از روی تحلیل گنجینه لغات
4- تشخیص قدرت حافظه افراد از روی تحلیل جملات
5- تشخیص وضعیت روحی افراد از روی تحلیل سخن.
6- تشخیص وضعیت روحی افراد از روی چهره.
7- تشخیص احساس از روی چهره(تنفر، دوستی، همدردی و.)
8- تشخیص اضطراب ار وری چهره.
9- تشخیص نگرانی از روی تحلیل جملات.
1-بهینه سازی مصرف انرژی با استفاده از اینترنت اشیا ر خانه های هوشمند
2- ایجاد پروتکل امن ارتباطی برای جلوگیری از هک دستگاههای الکترونیکی در واحدهای هوشمند
ارائه یک سیستم تشخیص و منترل وضعیت بیمار در بیمارستان ها
3- استفاده از اینترنت اشیا برای تشخیص، و هره نگاری و تعقیب هوشمند افراد خرابکار در تظارها و راهپیمای ها
4- پیش بینی رفتار انسان براساس یادگیری عمیق
5- تشخیص میزان سلامتی انسان از روی پردازش چهره و حرکات بدن
6- تشخیص و دسته بندی نژادهای انسان با استفاده از پردازش چهره
در صورت انتخاب موضوع و تایید استاد راهنما ، فورا به ما اطلاع بدین تا وضعیت آنهارا بروزرسانی کنیم.
در صورتی که در حوزه کامپیوتر، نرم افزار و موضوعی نیاز دارین به شکل رایگان موضوعات برای شما پیشنهاد می کنیم، ارائه موضوعات از کارشناسی تا دکتر قابل ارائه است.
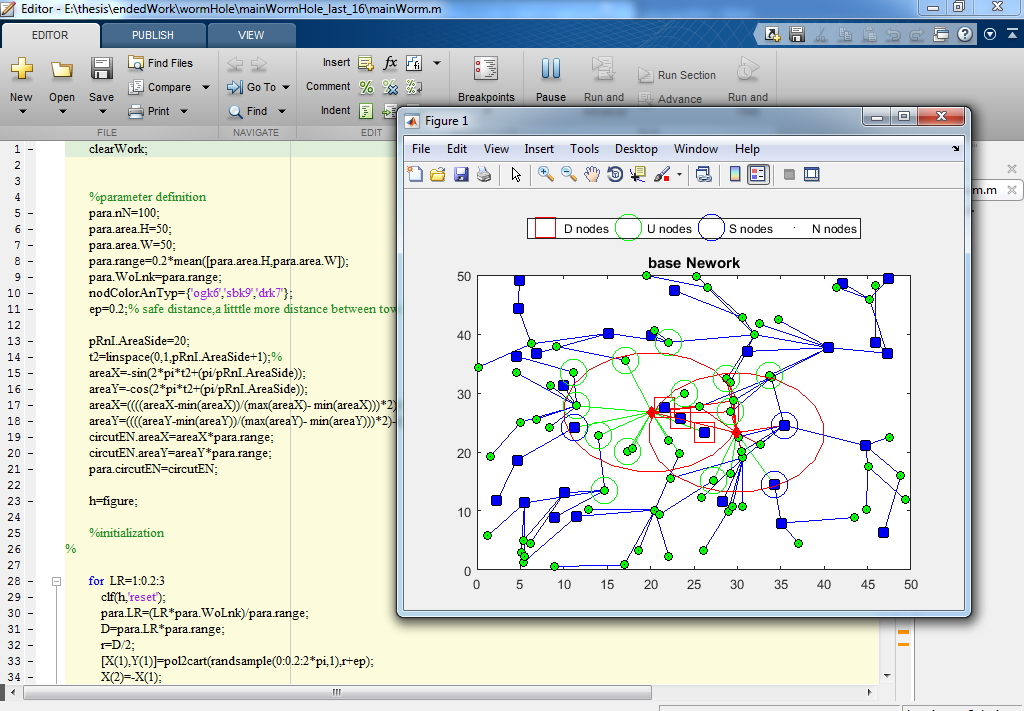
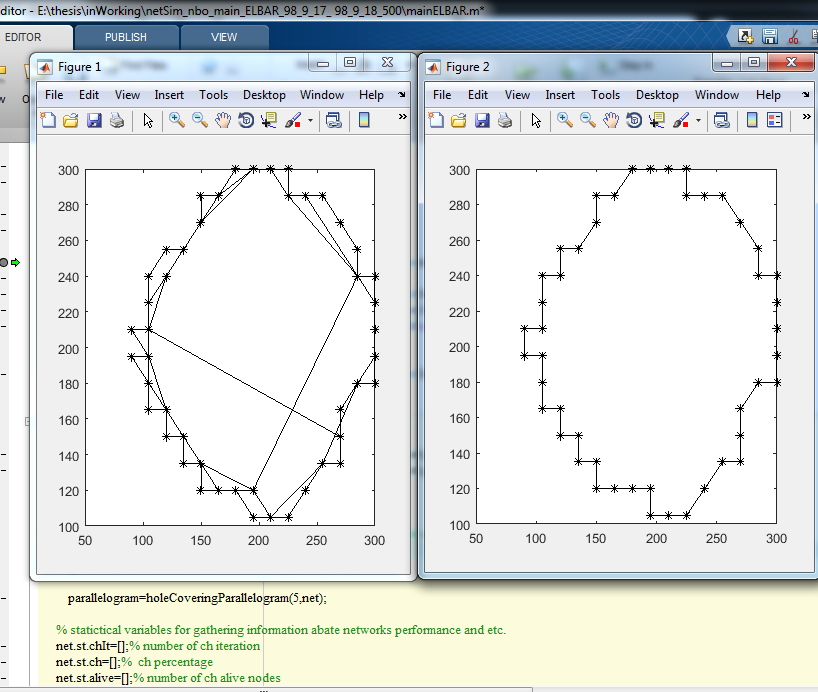
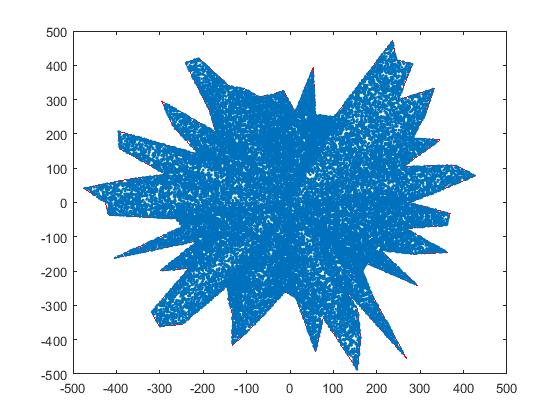
اغلب نواحی که برای شبیه سازی شبکههای بیسیم مورد استفاده قرار میگیرند، نواحی متقارن و عموما مربعی شکل میباشند ، حال آنکه به شکل طبیعی امکان توزیع متقارن نودها وجود نداره، در این پست سعی کردیم که کد توزیع نودها در فضاهای غیرمتقارن را منتشر کنیم، امیدواریم که براتون مفید واقع شده باشه.
در توزیع نودها از روش انتشار نقاط منحنی استفاده شده است.
کد متلب برای توضیحات بالا
%%%%%%%%%%%%%%%%%%%%%%%%%%-----------software details-----------%%%%%%%%%%%%%%%%%%%%%%
%devloped in Iran(ardebil)
%Copyright (C) 2020(1398) by moussa hasanzadeh as the head devloper %%
%All rights reserved.
%programed in mathlab 2016
%gmail:mo30no@gmail.com
%phone 09147082079
%% clear commands
delete(allchild(0));% delete all figures and graphical objects
clear;% Remove items from workspace, freeing up system memory
clc;% clear the Console
%% path commands
file=matlab.desktop.editor.getActive;% get current script address
try % if dont occur any error this block will run
fileDetail=dir(file.Filename);% get current script details
folderName=fileDetail.folder;% get current script folder name
catch% else if an error occurs then
index=strfind( file.Filename,'\');% find index of back space(\) in path text
folderName=file.Filename(1:index(end)-1);% select all path text from 1 to last Occurrence of \ as script folder name
end
paths=genpath(folderName);% make current path and all sub paths
addpath(paths);% add all paths in known paths of matlab
cd(folderName);% go to path that current script runned from that
%% net building commands
net=[];% create an empty var as net object
net.para.width=1000;% width param of net
net.para.length=1000;% width param of net
net.para.height=5;% width param of net
net.para.side=6;% side of Polygon
net.para.nodNum=1000 ;% number of nodes of net work
net.para.simPer=1000;% number of simulation period
net.para.sInd=0;%period counter
ph=pi/net.para.side;% used for shifting of area to be Attractive!
t=linspace(0,1,net.para.side+1);% Generate linearly spaced vector( used for making polygon)
x1=sin(2*pi*t+ph); x1=(((x1-min(x1))/(max(x1)-min(x1)))-0.5)* net.para.length;% x coordinate of area(after normalising)
y1=-cos(2*pi*t+ph);y1=(((y1-min(y1))/(max(y1)-min(y1)))-0.5)*net.para.width;% y coordinate of area(after normalising)
[x1,y1]=divider(x1,y1,10,1);% adding points between each pair of vertices
rs1=randsample(normalVect(rand(1,length(x1)),1,.5),length(x1));
figure;
x1=x1.*rs1;
y1=y1.*rs1;
[x1,y1]=divider(x1,y1,500);% adding points between each pair of vertices
x1(end+1)=x1(1);
y1(end+1)=y1(1);
plot(x1,y1,'r');hold on
rs=sqrt(randsample(normalVect(rand(1,length(x1)),.0,1),length(x1)));
plot(x1.*rs,y1.*rs,'.')
% give a vector or matrix for normalizing between tow number or 0 and 1
% vect=normalVect([1,-2,4,1,11,4,5])
% vect=normalVect([1,-2,4,1,11,4,5],-2,1)
% vect=normalVect([1,-2,4;11,4,5])
function vect=normalVect(varargin)
if nargin==0
msgbox('give a 1 argoment atleast');
vect=[];
elseif ~isnumeric(varargin{1})
msgbox('abnormal argoment');
vect=[];
else
vect=varargin{1};
if nargin==1
vect=(vect-min(vect(:)))./(max(vect(:))-min(vect(:)));
elseif nargin==3 || nargin>3
if varargin{2}~=varargin{3}
vect=(vect-min(vect(:)))./(max(vect(:))-min(vect(:)));
vMin=min([varargin{2},varargin{3}]);
vMax=max([varargin{2},varargin{3}]);
vDif=vMax-vMin;
vect=(vect*vDif)+vMin;
if nargin>3
msgbox('we used 3 argoment only');
end
else
vect=(vect-min(vect(:)))./(max(vect(:))-min(vect(:)));
msgbox('abnormal limits: normaled 0: 1');
end
end
end
end
%version 1.1
%isFair=1 adding points is based on distance isFair=2 adding of points based on edges
function [X,Y]=divider(X,Y,n,isFair)
try
if isFair==1
else
isFair=0 ;
end
catch
isFair=0;
end
switch isFair
case 0
T1=0;
T2=0;
for i=1:length(X)-1
temp1=0;
temp1=linspace(X(i),X(i+1),n+2) ;
T1=[T1,temp1(1:end-1)];
end
T1=[T1,temp1(end)];
X=T1(2:end);
for i=1:length(Y)-1
temp2=0;
temp2=linspace(Y(i),Y(i+1),n+2) ;
T2=[T2,temp2(1:end-1)];
end
T2=[T2,temp2(end)];
Y=T2(2:end);
case 1
dists= sqrt( (X(2:end)-X(1:end-1)).^2 + (Y(2:end)-Y(1:end-1)).^2) ;
n1=round((dists./min(dists))*n);
T1=0;
T2=0;
for i=1:length(X)-1
temp1=0;
temp1=linspace(X(i),X(i+1),n1(i)+2) ;
T1=[T1,temp1(1:end-1)];
end
T1=[T1,temp1(end)];
X=T1(2:end);
for i=1:length(Y)-1
temp2=0;
temp2=linspace(Y(i),Y(i+1),n1(i)+2) ;
T2=[T2,temp2(1:end-1)];
end
T2=[T2,temp2(end)];
Y=T2(2:end);
end
end
نمونه خروجی برای کد بالا(Output sample for the above code):
برای اینکه مشخص شود که نقطهای در زاویه دید یک نقطه مرجع دیگر با زاویه مشخص شده با دو خط قرار دارد یا نه، کافی که مختصات نقطه هدف و انتهای دو خط را مشخص کرده و پس از انتقال مبداء به نقطه مرجع و تبدیل آنها به مختصات قطبی در 360 درجه، مقادیر قطبی انتهای دو خط با مقادیر نقطه هدف مقایسه شود.

کد متلب کل عملیات فوق در زیر:(the related matlab code for this operation)
function fg=IsPointInsideAngle(basePoint,leftPoint,rightPoint,quPoint ) Px=basePoint.x; Py=basePoint.y; Ax=leftPoint.x; Ay=leftPoint.y; Cx=rightPoint.x; Cy=rightPoint.y; Dx=quPoint.x; Dy=quPoint.y; % transformed Ax and Cx tAx= Ax-Px; tAy= Ay-Py; tCx= Cx-Px; tCy= Cy-Py; tDx= Dx-Px; tDy= Dy-Py; figure;plot([0, tAx],[0, tAy],'c');hold on;plot([0, tCx],[0, tCy],'c');hold on;plot(tDx,tDy,'rO');hold on [tAtet,tArho]=cart2pol(tAx,tAy);tAtet=Angle2pol_To_1pol(tAtet,1); [tCtet,tCrho]=cart2pol(tCx,tCy); tCtet=Angle2pol_To_1pol(tCtet,1); [tDtet,tDrho]=cart2pol(tDx,tDy); tDtet=Angle2pol_To_1pol(tDtet,1); fg=isItBetween(tAtet,tDtet,tCtet); end function fg=isItBetween(num1,quNum,num2) fg=0; [val,~]=sort([num1,num2],'ascend'); if quNum>=val(1) && quNum<=val(2) fg=1; end end
دقت کنین دو تابع بالا در یک اسکریپت هم نام تابع اول باید قرار گیرد وگرنه می تونید دو تابع را در دو اسکریپت مجزا هم نام توابع مذکور قرار دهید
برای فراخوانی این تابع میتوانید از کد زیر استفاده کنید:( calling script of th above function)
basePoint.x=4;
basePoint.y=8;
leftPoint.x=16;
leftPoint.y=18;
rightPoint.x=20;
rightPoint.y=6;
quPoint.x=15;
quPoint.y=13;
fg2=IsPointInsideAngle(basePoint,leftPoint,rightPoint,quPoint );
خروجی به شکل 1و 0 خواهد بود.
the output will be as 1 , 0 or true and false
طبق تصویر زیر برای تعیین اینکه نقطه در داخل مثلث قرار داره یا خارج از آن باید زاویه سه مثلثی که رئوس مثلث با نقطه مورد نظر میسازند را محاسبه کنین، حالا براحتی میتونین با جمع کردن زوایا، طبق شکل زیر موقعیت نقطه را مشخص کنین، اگر α+β+γ=360 باشد، نقطه در داخل مثلث و اگر α+β+γ<360 در آنصورت نقطه در خارج از مثلث قرار دارد. از این ترفند ساده ریاضی برای تشخیص وجود نقاط در داخل چند ضلعی هم میتوانید استفاده کنید.
کاربرد این مسئله ساده ریاضی بیشتر در چشمهای الکترونیکی در رباتها میباشد
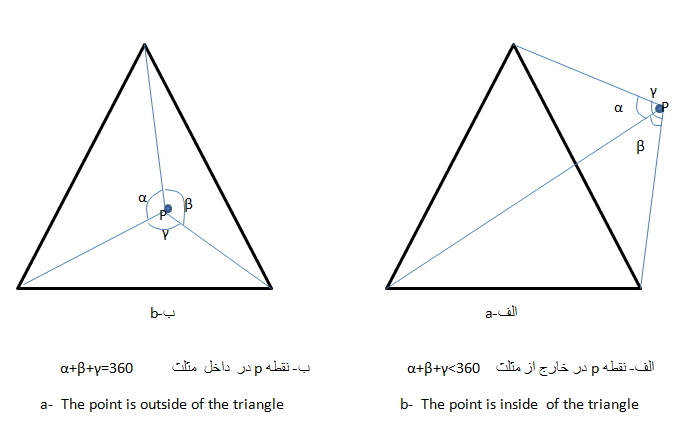
کد متلب برای تصویر بالا بزودی منتشر خواهد شد.
The MATLAB code for the above image will be released soon.
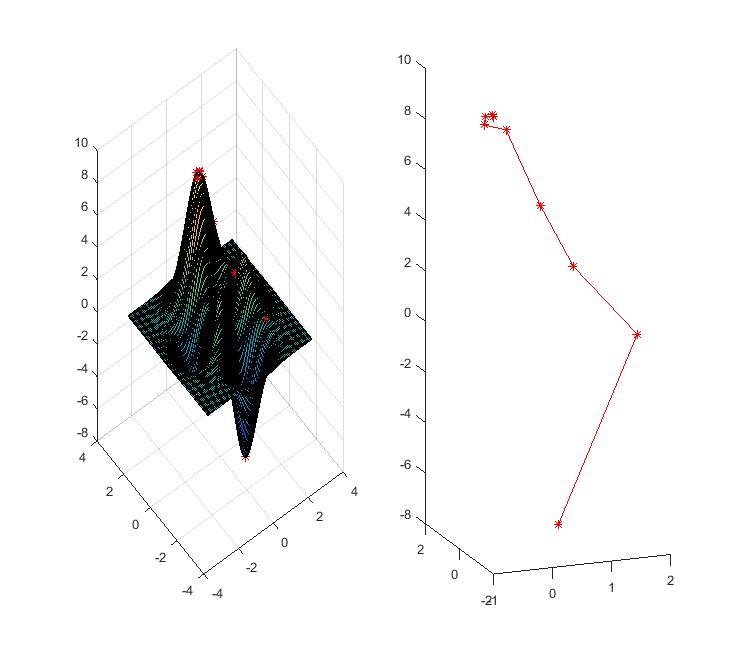
برداشت کلی این است که نوشتن یک تابع فیتنس عموما با الگوریتمهای فراابتکاری معنی پیدا میکند، با این وجود یک تابع فیتنس چیزی نیست جز انتخاب جواب های بهینه از بین مجموعههایی که به شکل تصادفی، حریصانه. انتخاب میشوند. تابع فیتنس میتواند از نوع مینیمم، ماکزیمم یا همگرا به سمت مقادیر یا بردارها و. باشد.
به عنوان یک مثال ساده برای تابع فیتنس برای ماکزیمم سازی را میتوان به شکل زیر اورد.
فقط حواستون باشه، برای نوشتن تابع فیتنس برای مینیمم سازی باید مقدار اولیه بردار پاسخ را برابر بی نهایت یا inf قرار بدید و برای ماکزیمم سازی این مقدار را برابر با 0 یا حداقل مقدار قرار بدید.
clc
clear;
close all;
[X,Y,Z] = peaks(100);
[val,ind]=min(Z(:));
v.val=val;
v.ind=ind;
cn=0;
hs=figure('name' , ['period: ' num2str(cn) ' of ' num2str((length(X(:))) ) ' curen value: ' num2str(v.val(end)), ' real max value: ' num2str( max(Z(:)))] );
subplot(1,2,1);surf(X,Y,Z);hold on
subplot(1,2,1);plot3(X(ind),Y(ind),Z(ind),'r*');hold on
while(true)
ind= randi(length(X(:)),1);
if v.val(end)<Z(ind)
v.val(end+1)=Z(ind);
v.ind(end+1)= ind ;
subplot(1,2,1);plot3(X(v.ind),Y(v.ind),Z(v.ind),'r*');hold on ;
subplot(1,2,2);plot3(X(v.ind),Y(v.ind),Z(v.ind),'r-*');hold on
else
disp('');
end
cn=cn+1;
pause(0.002)
if cn>=length(X(:)) || v.val(end)==max(Z(:))
break;
end
hs.Name=['period: ' num2str(cn) ' of ' num2str((length(X(:))) ) ' curen value: ' num2str(v.val(end)), ' real max value: ' num2str( max(Z(:)))];
end
خروجی کد بالا به شکل زیر خواهد بود:

درباره این سایت